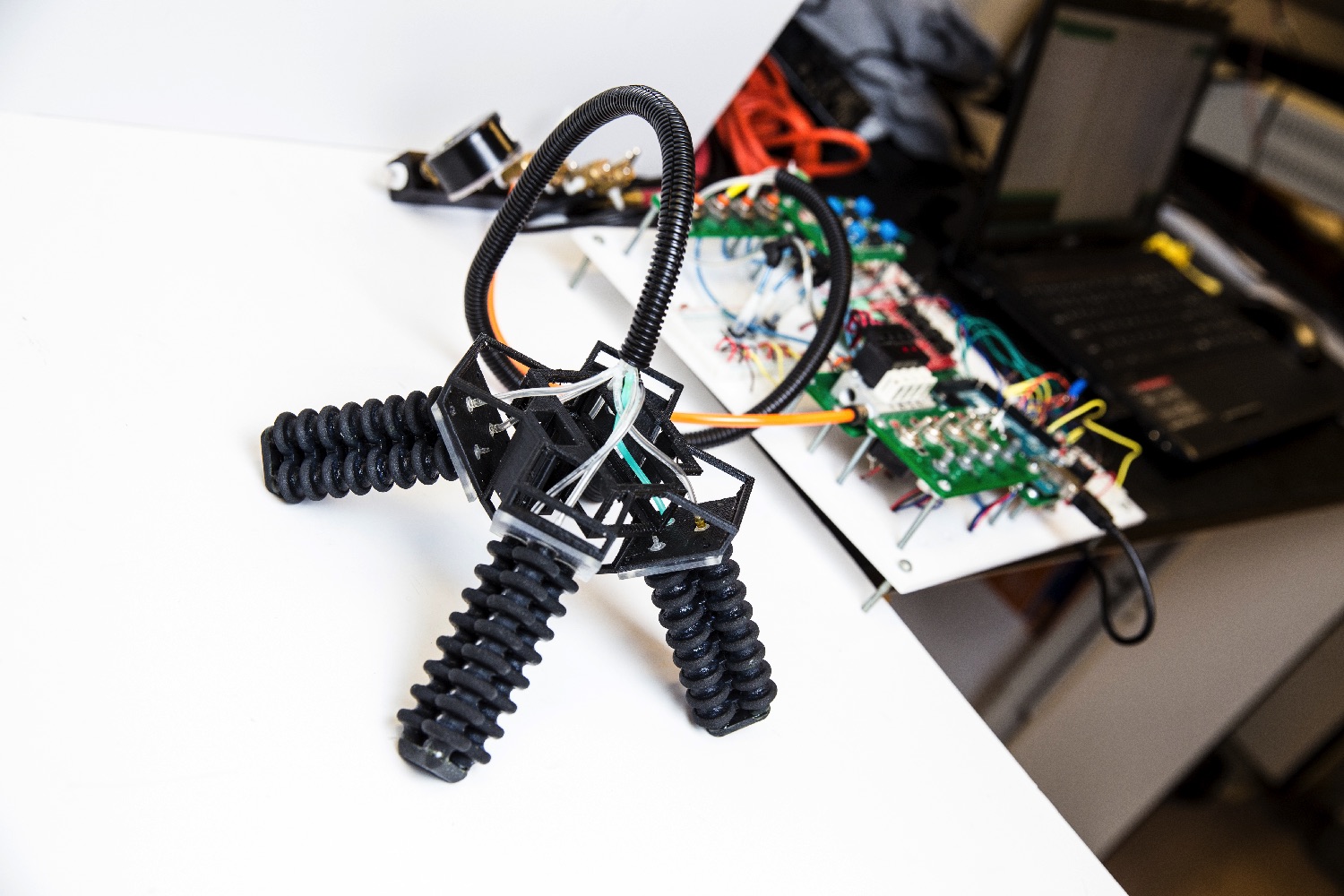
“Our robot is actuated using compressed air, allowing it to achieve complex motions without a complex control scheme,” Michael Tolley, a mechanical engineering professor at the UCSD, told Digital Trends. “The design was enabled by using a multi-material 3D printer which allows us to fabricate complex geometries made from digital combinations of soft and rigid materials.”

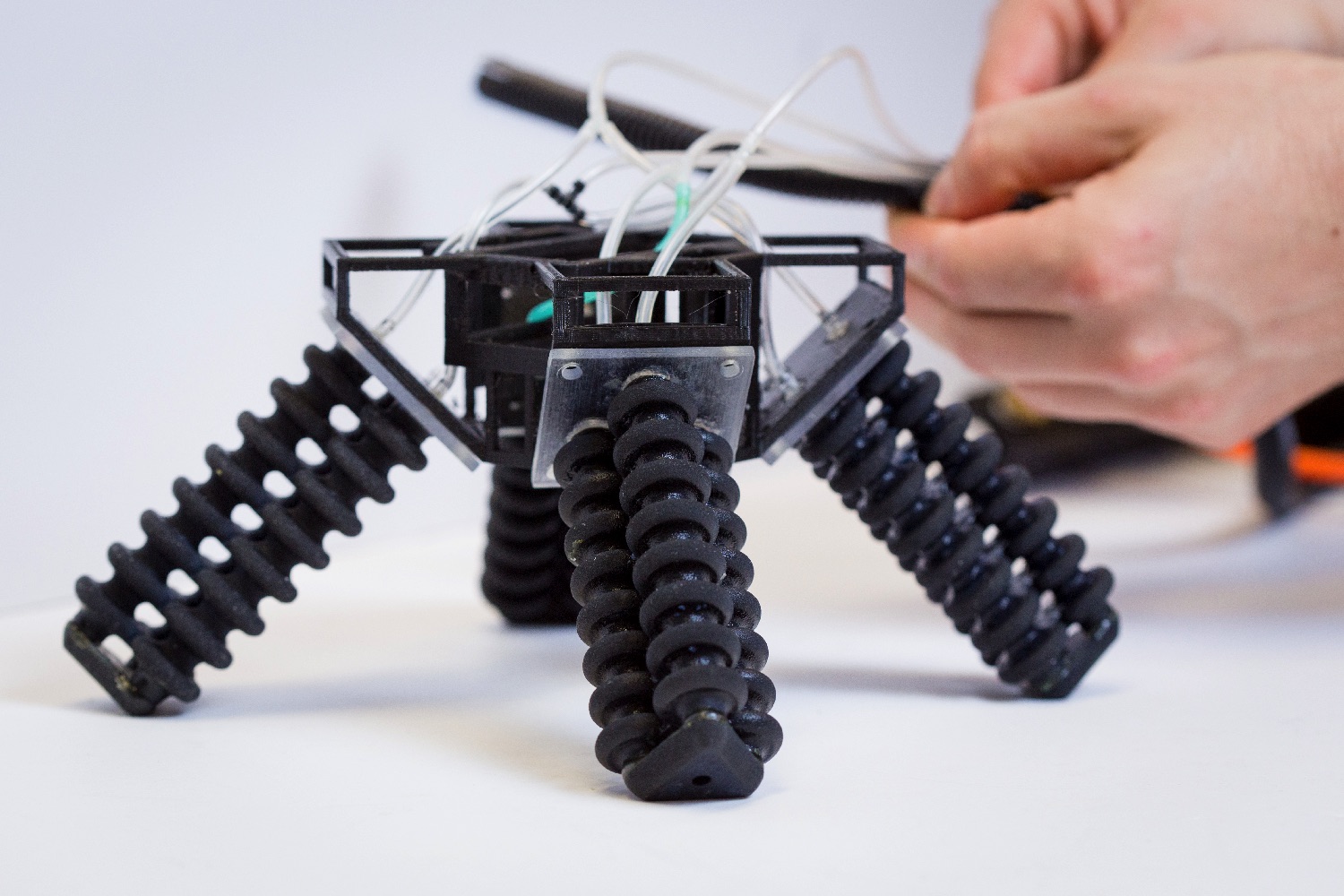
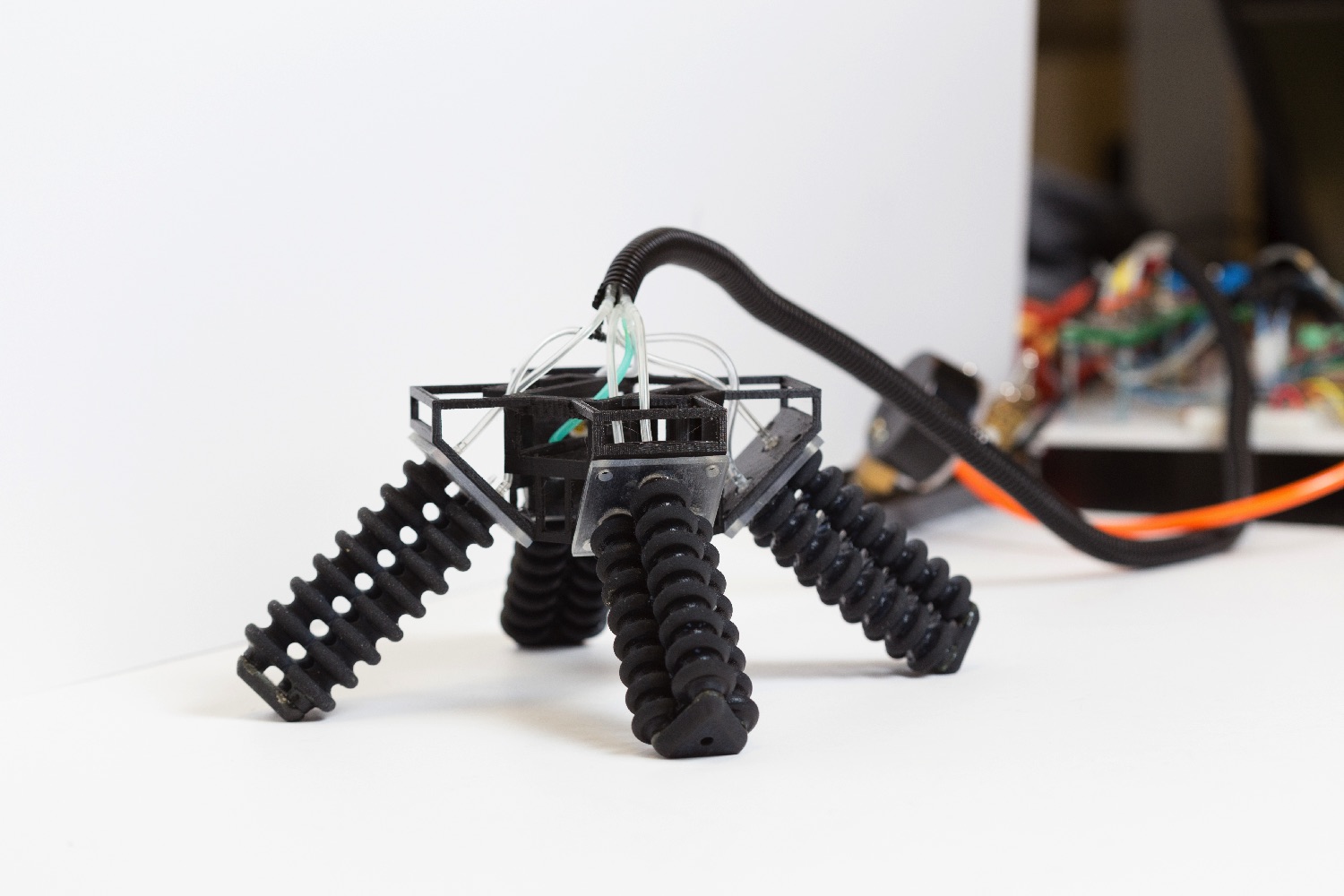
According to Tolley and co-researcher Dylan Drotman, the soft robot was inspired by biological systems like the octopus, which are able to squeeze their bodies through extremely small openings due to their lack of a rigid skeleton. The robot’s walking gait was meanwhile inspired by terrestrial quadrupeds like the turtle.
“Multi-material 3D printing is a key enabler as it allows us to rapidly fabricate much more complex 3D soft designs than previous methods such as molding, which has been primarily used for previous soft robots,” Tolley continued. “We have also demonstrated in related work how multi-material 3D printing can be used to print gradients in stiffness to reduce stress concentrations.”
Next up, the researchers plan to equip the robot with sensors that will let it better understand its local environment and potentially to find a use in an area like search and rescue missions. It is unlikely that the final form of the robot will be exactly like this one but it is still a valuable contribution toward robotics’ eventual goal of creating a robot that is able to deal with any scenario thrown at it.
Tolley and Drotman’s 3D-printed robot will be shown at the upcoming Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation, running (or should that be crawling?) from May 29 to June 3 in Singapore.



